






















































Camera object
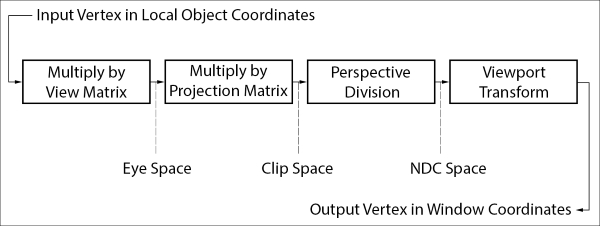
In order to build engaging physics demos, we need to be able to view a 3D scene in some way. This is where a camera becomes useful. A 3D camera is made up of two matrices, the view matrix and the projection matrix. The view matrix is the inverse of the camera's world transform. The projection matrix transforms vertex data from eye space to NDC space:
The view matrix of a camera should be orthogonal. An orthogonal camera is one whose rotation basis vectors are at right angles from each other. Two vectors that are at a right angle are orthogonal. Orthogonal vectors are perpendicular to each other. The result of the dot product between two perpendicular vectors is zero.
In general, cameras should not have any scale. Because scale is stored within the same components of a 4D matrix as rotation, it is a bad idea to add scale to a camera. Each of the rotation basis vectors we store within our camera will be of unit length. When the rotation basis vectors of an orthogonal matrix...





